
I’ve been working on this in odd hours for the last month or so. But. Next time Read The ^#@^% Directions All The Way Through Before Starting The Build.
No, really. I’ve had to go back a few times and take something apart because I thought I knew what I was doing. I even had to solder some wires back together because it seemed so obvious that I should snip them short where they came out of the stepper, connect to a terminal block (modularity!) and then wire from there. Except not quite enough wire. (Ooh, maybe I could use that roll of rigid jacketed stuff that’s no good for anything else, since that’s the one run on the entire project the doesn’t need to flex endlessly. Nah…)
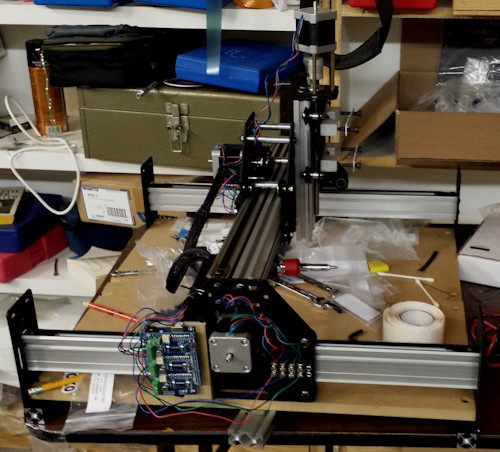
I mounted the controller on the Y axis, not so much because it’s cool, but because it simplifies the cable bundling. The instructions warn that it’s hard to attach the arduino and the grblshield to the end plate once you’ve got everything assembled, but it really isn’t. I just nipped out to my pile of scrap plywood and cut a tiny piece that I screwed to the plate. And then I screwed the arduino to the plywood. If I get some time and motivation, I’ll make a 3-D printable version of the scrap piece, complete with cutouts for bolt heads and undersized circuit-board mounting holes.
The 2 is a lot more rigid than the first Shapeoko, but it’s still pretty flexible. I’ll be able to take some of that up by adjusting the v-wheels and tightening a few nuts and bolts some more, but ultimately there’s only so much you can do with delrin and extruded aluminum. (I think the first Bridgeport mill I ever got near in college had a solid column pretty much the same cross-section as this whole machine.) And it’s probably a good thing that the whole design flexes, because otherwise if you tried to cut too hard something vital would just break.
Oh, and meanwhile thanks so much to the folks at GRBL. The new version has pretty much all the bits I want, especially the separate speeds and accelerations for different axes. That will make a huge difference to the shapeoko (where the z-axis acceleration has never been what you would call spritely).
